三(sān)分鍾了解最(zuì)新CAN FD協議
對于中(zhong)國制造2025與汽(qì)車産業發展(zhǎn)方向,新能源(yuan)和智👄能化一(yī)直是人們讨(tao)論的兩個主(zhu)題。在汽車智(zhi)能化的過程(cheng)中,CAN FD協議由于(yú)其優越的性(xìng)能受到了大(dà)家廣泛的關(guan)注,本文将和(hé)大家一起了(le)解最新CAN FD。
當今(jīn)社會,汽車已(yi)經成爲了我(wo)們生活中不(bu)可缺少的一(yi)㊙️部分👌,人👨❤️👨們希(xī)望汽車不僅(jin)僅是一種代(dai)步工具❤️,更希(xī)望在汽車💜是(shì)生活及工作(zuò)範圍的一種(zhong)延伸。在汽車(che)上🏃♂️就像呆♈在(zai)自己的辦公(gong)室和家🔅裏一(yi)樣,可以打電(dian)話、上網、娛樂(le)、工作。
因此,汽(qì)車制造商爲(wèi)了提高産品(pin)競争力,将越(yuè)來越多功能(neng)🔴集成🧑🏽🤝🧑🏻到了汽(qi)車上。ECU(電子控(kong)制單元)大量(liàng)地增♻️加使總(zong)線負載率急(ji)劇增大,傳統(tong)的CAN總線越來(lai)越顯得力不(bú)從心。因此,CAN FD(CAN with Flexible Data-Rate)協(xié)議誕生了。
它(tā)繼承了CAN總線(xian)的主要特性(xìng),提高了CAN總線(xian)的網絡通㊙️信(xìn)🌈帶寬,改善了(le)錯誤幀漏檢(jiǎn)率,同時可以(yǐ)保持網絡系(xì)統大部分軟(ruan)✍️硬件特别是(shi)物理層不變(bian)。這種相似性(xìng)使ECU供應商不(bú)需要對ECU的軟(ruan)件部分做大(dà)規模修改即(jí)可升級汽車(chē)通信網絡。
一(yī)、CAN FD做出的改進(jin)
CAN FD采用了兩種(zhǒng)方式來提高(gao)通信的效率(lǜ):一種方式爲(wei)縮短位㊙️時間(jian)提高位速率(lü);另一種方式(shi)爲加長數據(ju)場長度減少(shao)報文數量降(jiang)👉低總線負載(zǎi)率。在CRC校驗段(duan)🆚采用了🏃♂️三種(zhong)多🛀🏻項式來保(bǎo)證高㊙️速通訊(xùn)下的數據可(kě)靠性。
1、可變速(sù)率(CAN with Flexible Data-Rate)
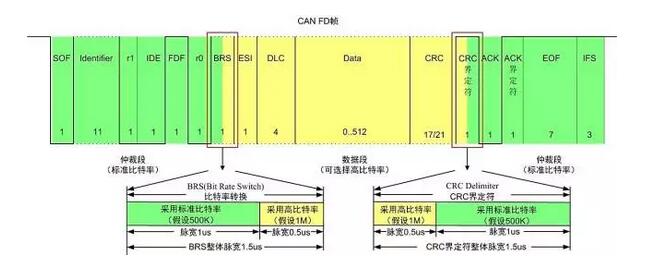
從控制場(chǎng)中的BRS位到ACK場(chang)之前(含CRC分界(jie)符)爲可變速(su)率㊙️,其餘部分(fèn)爲☎️原CAN總線用(yong)的速率。兩種(zhong)速率各有一(yī)套位時間定(dìng)💘義寄存器♍,它(ta)們除了采用(yong)不同的位時(shí)間單位TQ外☁️,位(wèi)時間各段的(de)♻️分配比例也(yě)可不同。
2、新的(de)數據場長度(dù)
CAN FD對數據場的(de)長度作了很(hen)大的擴充,DLC最(zui)大支持64個字(zi)❤️節,在DLC小于等(děng)于8時與原CAN總(zong)線是一樣的(de),大于8時則有(yǒu)一個非線性(xìng)的增長,最大(da)的數據場長(zhǎng)度可達64字節(jie)㊙️。如下所🌂示爲(wèi)DLC數值與字節(jiē)數的非線性(xing)對應關系。

在CAN FD協議(yì)标準化的過(guò)程中,通信的(de)可靠性也得(de)到了提高🥰。由(yóu)于DLCs的長度不(bu)同,在DLC大于8個(ge)字節時,CAN FD選擇(zé)了兩種新的(de)BCH型♊CRC多項式。

二(er)、CAN FD幀結構分析(xī)
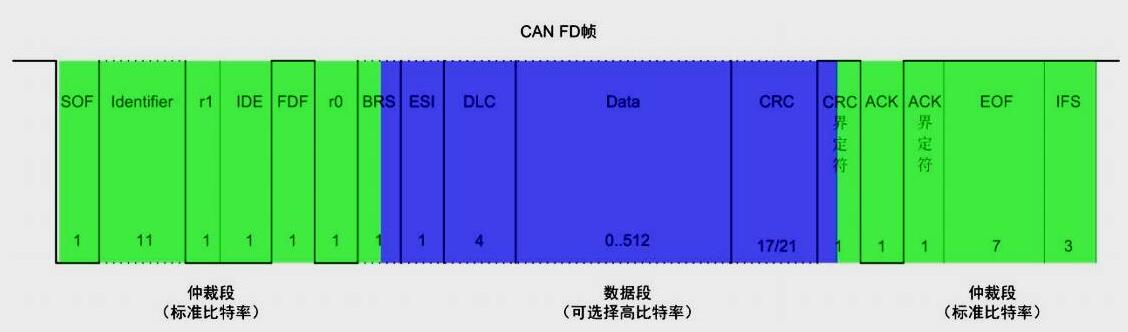
1、CAN FD數據幀在幀(zhen)起始(SOF)和仲裁(cai)段(Arbitration Field)
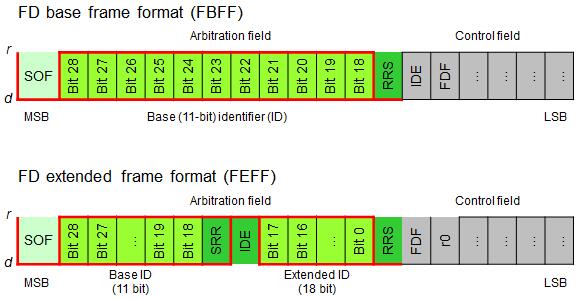
與傳統CAN相(xiang)比,CAN FD取消了對(duì)遠程幀的支(zhī)持,用RRS位替換(huàn)了RTR位,爲💚常顯(xian)性。IDE位仍爲标(biāo)準幀和擴展(zhan)幀标志位,若(ruo)标準幀與擴(kuò)展幀具有相(xiàng)同的前 11位ID,那(na)麽标準幀将(jiāng)會由于IDE位爲(wei)0,優先✏️獲得總(zong)線。
RRS(remote request substitution)遠程請求(qiú)替換位:即傳(chuan)統CAN中的RTR位;
SRR (substitute remote request)代(dài)替遠程幀請(qǐng)求位:SRR位爲保(bao)留位,無影響(xiang);
IDE(Identifier Extension)擴展幀标志(zhì):顯性(0)=11位ID,隐性(xìng)(1)=29位ID。
2、CAN FD在控制段(duàn)中新添加了(le)三個位FDF位、BRS位(wei)、ESI位
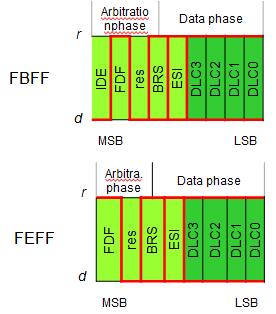
FDF位(Flexible Data Rate Format):原CAN數據(jù)幀中的保留(liú)位r。FDF位常爲隐(yǐn)性(1),表示CAN FD報文(wen);
BRS位( Bit Rate Switch):位速率轉(zhuǎn)換開關,當BRS爲(wei)顯性位(0)時數(shu)據段的位速(sù)率與仲裁段(duan)的位速率一(yī)緻,當BRS爲隐性(xing)位(1)時數據段(duàn)的位🧑🏽🤝🧑🏻速率高(gao)于仲裁段的(de)位速率;
ESI位(Error State Indicator):,錯(cuò)誤狀态指示(shi),主動錯誤時(shí)發送顯性位(wei)(0),被動錯誤時(shi)㊙️發送🌐隐㊙️性位(wèi)(1)。
3、DLCs的值與數據(ju)場和CRC校驗場(chang)有關,在上文(wén)中已經說明(míng)。
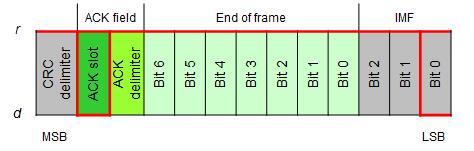
4、CAN FD的确認場,幀(zhēn)結尾及間歇(xie)場與傳統CAN一(yi)樣,就不再贅(zhuì)述。
三、如何從(cong)傳統的CAN升級(ji)到CAN FD
盡管CAN FD繼承(cheng)了絕大部分(fen)傳統CAN的特性(xìng),但是從傳統(tǒng)CAN到CAN FD的升級,我(wo)們仍需要做(zuo)很多的工作(zuò)。
1、在硬件和工(gōng)具方面,要使(shǐ)用CAN FD,首先要選(xuǎn)取支持CAN FD的CAN控(kong)制器和收發(fā)器,還要選取(qu)新的網絡調(diao)試和監測工(gong)具。
2、在網絡兼(jian)容性方面,對(dui)于傳統CAN網段(duàn)的部分節點(dian)需❄️要‼️升級到(dào)CAN FD的情況要特(tè)别注意,由于(yu)幀格式不一(yī)緻的原☂️因,CAN FD節(jie)點可以正常(chang)收發傳統CAN節(jie)點報文,但是(shi)傳☀️統CAN節點不(bu)能正常收發(fa)CAN FD節點的報文(wen)。