構(gòu)建專屬于你(ni)的CAN-bus應用層協(xie)議
來源:緻遠(yuan)電子 發布時(shi)間:2025-12-12 浏覽量:60
随(suí)着CAN-bus相關芯片價(jia)格的下降,内(nèi)置CAN控制器MCU的增多(duō),CAN-bus當(dāng)前已經進入(ru)了衆多早期(qi)由于成本問(wen)題無法使用(yòng)的領域,成爲(wèi)極具生命力(lì)的現場總線(xiàn),今天我們就(jiu)來探讨如何(hé)構建專屬自(zì)己的CAN-bus
在CAN-bus網絡上(shang),CAN報(bao)文以廣播的(de)形式發送,CANCAN報(bào)文由接收點(dian)的軟件确定(dìng)。CAN-bus隻(zhi)提供可靠的(de)報文傳輸服(fu)務,CAN報文的使用(yong)由應用者定(ding)義, 所以(yǐ)應用層協(xié)議就是這樣(yang)一個規則。
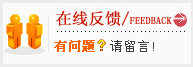
這個(gè)規則,定義了(le)CAN報(bào)文中幀ID及幀數(shù)據的使用方(fang)式,如将幀ID定義(yì)爲需要處理(li)該幀數據的(de)CAN節(jiē)點地址等。根(gēn)據應用場合(he)的不同,國際(ji)上出現了多(duō)種CANCAN-bus應用層(céng)協議如下:
CAN-bus應用層(céng)協議
構(gòu)建一個現場(chang)總線網絡,需(xu)要解決的關(guan)鍵技術問題(ti)有:
-
高電磁幹擾(rao)環境下的可(kě)靠數據傳輸(shū);
-
最大傳(chuán)輸距離時延(yan)時大小的确(què)定;
-
網絡(luo)的容錯技術(shù);
-
網絡的(de)監控和故障(zhàng)診斷功能。
要解決以上(shang)問題,需要充(chong)分考慮現場(chǎng)總線網絡所(suǒ)采用的總線(xiàn)類型,因爲以(yǐ)上問題和總(zǒng)線的性能特(tè)點是密切相(xiàng)關的,那麽我(wo)們就看一下(xià)
-
CAN-bus網絡(luo)傳輸速度最(zui)高可達1Mbps,
-
CAN-bus采用差分信(xìn)号傳輸,并采(cai)用可靠的數(shu)據校驗和錯(cuo)誤檢測機制(zhì)。
-
可以通過制(zhì)定嚴禁的CAN-bus應用(yòng)層協議解決(jué)網絡監控和(hé)診斷。
包含報文标(biāo)識符的分配(pei)和報文數據(jù)的分配,報文(wén)格式的定義(yì),實質是将CAN報文(wen)的分配規則(zé)進行詳細的(de)描述。
報(bao)文的定義:
CAN2.0A幀:11位ID
CAN2.0B29位(wèi)
報文數據(ju)的定義:
每幀報(bào)文最多包含(han)8
在CAN網絡中(zhōng),通過報文的(de)标識符進行(hang)信息的區分(fèn),因此通過報(bao)文的各種标(biao)識符分配來(lai)達到建立信(xin)息鏈接的目(mu)的。
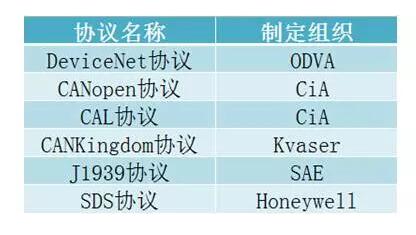
命(ming)令/響應模式通(tōng)信
數據通(tong)信協議基本(běn)上可以劃分(fèn)爲“面向節點(dian)的協議”和“面(miàn)向報文的協(xié)議”兩種類型(xíng),如下圖:
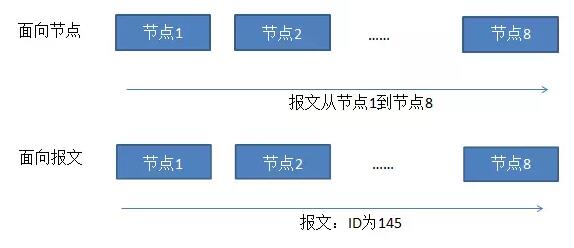
制定一個應(yīng)用層協議